| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Механической системы с одной степенью свободы
Для заданной механической системы с помощью общего уравнения динамики определить ускорения грузов и центров масс катков, а также силы натяжения нитей, к которым прикреплены эти элементы системы. Массами нитей пренебречь. Трение качения и силы сопротивления в подшипниках не учитывать. Система движется из состояния покоя. Варианты механических систем показаны на рис. 60−64, а
Рис. 60
необходимые для решения данные приведены в табл. 11. Блоки и катки, для которых радиусы инерции в таблице не указаны, считать сплошными однородными цилиндрами.Все катки, включая и катки, обмотанные нитями, перемещаются по опорным поверхностям без скольжения. Пример выполнения задания (рис. 65).Дано:
Рис. 65
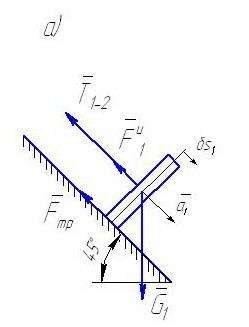
за 1 и центра масс катка 3, а такжесилы натяжения ветвей 1−2 и 2−3 нитей. Решение. В качестве объекта исследования рассмотрим движущуюся механическую систему, состоящую из груза 1, барабана 2 и катка 3. Для определения искомых ускорений на основании принципа Даламбера – Лагранжа составим общее уравнение динамики рассматриваемой системы. Система приходит в движение из состояния покоя, поэтому направления ускорений тел соответствуют направлениям их движения. Положим, что при движении системы груз 1 опускается вниз по наклонной плоскости (рис. 65). На механическую систему действуют следующие активные силы: силы тяжести Ввиду того, что среди связей, наложенных на систему имеется неидеальная (шероховатая наклонная плоскость, по которой скользит груз ), при составлении общего уравнения динамики ее реакция – сила трения скольжения Если в результате решения задачи искомое ускорение получается отрицательным, значит, в рассматриваемом случае направление движения системы выбрано ошибочно и поэтому расчет необходимо повторить, изменив направление силы трения и внеся соответствующие поправки в общее уравнение динамики. В соответствии с принципом Даламбера – Лагранжа реакции идеальных связей системы не учитываются и на расчетной схеме не показываются. Добавим к действующим на систему силам силы инерции элементов системы, приведя их к простейшему виду. Силы инерции груза 1, движущегося поступательно с ускорением Для определения ускорения
Зафиксировав систему в текущем положении и сообщив ей возможное перемещение, допускаемое связями (рис. 65, б), составим уравнение (1):
где
Поскольку зависимости между возможными перемещениями такие же, как и между соответствующими скоростями, выразим скорость центра масс катка и угловые скорости барабана и катка через скорость груза:
Так как каток катится без скольжения, то точка его контакта с неподвижной наклонной плоскостью является мгновенным центром скоростей катка и поэтому
Аналогичные зависимости имеют место и между возможными перемещениями:
Теперь, дифференцируя полученные выше соотношения, связывающие
Уравнение (2) с учетом соотношений (3) принимает вид
или, сокращая на
Учитывая соотношения (4) и исходные данные задачи
вычислим модули сил инерции
и подставим вычисленные величины в уравнение (5):
Отсюда Для определения силы натяжения ветви 1−2 нити в качестве объекта исследования рассмотрим груз 1 , заменяя действие нити на него соответствующей реакцией
Рис. 66
Общее уравнение динамики в этом случае имеет следующий вид:
откуда
Для определения силы натяжения нити 2−3 рассмотрим каток 3 как объект исследования и заменим действие на него нити соответствующей реакцией Общее уравнение динамики, составленное для катка 3, имеет вид:
Отсюда
и
Ответ: МЕТОД ОБОБЩЕННЫХ КООРДИНАТ И УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
|


 Рис. 61
Рис. 61 Рис. 62
Рис. 62 Рис. 63
Рис. 63 Рис. 64
Рис. 64



 радиус инерции барабана 2 относительно неподвижной оси вращения
радиус инерции барабана 2 относительно неподвижной оси вращения  ;
;  Определить ускорения гру-
Определить ускорения гру-

 −груза 1,
−груза 1,  − барабана 2 ,
− барабана 2 ,  − катка 3.
− катка 3. учитывается наряду с активными силами системы. При этом необходимо правильно показать направление силы трения.
учитывается наряду с активными силами системы. При этом необходимо правильно показать направление силы трения. , приводятся к равнодействующей
, приводятся к равнодействующей  , направленной противоположно этому ускорению и приложенной в центре масс груза. Силы инерции барабана 2, вращающегося вокруг неподвижной оси с угловым ускорением
, направленной противоположно этому ускорению и приложенной в центре масс груза. Силы инерции барабана 2, вращающегося вокруг неподвижной оси с угловым ускорением  , приводятся к паре с моментом
, приводятся к паре с моментом  , направленным в сторону, противоположную этому угловому ускорению. Силы инерции катка 3, совершающего плоское движение, приводятся к главному вектору
, направленным в сторону, противоположную этому угловому ускорению. Силы инерции катка 3, совершающего плоское движение, приводятся к главному вектору  , направленному противоположно ускорению
, направленному противоположно ускорению  центра масс катка и приложенному в этом центре, и главному моменту
центра масс катка и приложенному в этом центре, и главному моменту  относительно центральной оси катка, направленному в сторону, противоположную угловому ускорению
относительно центральной оси катка, направленному в сторону, противоположную угловому ускорению  катка.
катка. , (1) где
, (1) где  − сумма элементарных работ активных сил;
− сумма элементарных работ активных сил; − сумма элементарных работ сил инерции.
− сумма элементарных работ сил инерции. (2)
(2) и
и  − возможные перемещения груза и центра масс катка;
− возможные перемещения груза и центра масс катка; и
и  − углы поворотов барабана и катка.
− углы поворотов барабана и катка. ;
;  ;
; .
. (3)
(3) ,
,  и
и  со скоростью
со скоростью  , получим зависимости между угловыми ускорениями
, получим зависимости между угловыми ускорениями  центра масс катка и искомым ускорением
центра масс катка и искомым ускорением  груза:
груза: . (4)
. (4)
 , получим:
, получим: . (5)
. (5) ,
, ,
,  и моментов пар
и моментов пар  ,
,  через искомое ускорение
через искомое ускорение  :
: ;
; ;
;  ;
; ;
; 
 .
. м/с2;
м/с2;  м/с2.
м/с2. (рис. 66, а).
(рис. 66, а).


 (рис. 66, б).
(рис. 66, б). .
.
 .
. м/с2;
м/с2;  м/с2;
м/с2;  ;
;